SPROS IRC is a Space Robotics Engineering Competition. It challenges university students to conceptualize, design, develop, and operate an astronaut-assistive next-generation Space Rover and perform specific missions in Mars-simulated conditions.

SPROS IRC is a Space Robotics Engineering Competition. It challenges university students to conceptualize, design, develop, and operate an astronaut-assistive next-generation Space Rover and perform specific missions in Mars-simulated conditions.
Started in the year 2017, the International Rover Challenge (formerly Indian Rover Challenge) held its first edition in January of the following year.
Over the years, IRC has established itself as one of the leading Space Robotics competitions.
In IRC 2024, there will be an increased emphasis on creating awareness about the best practices and methods of systems engineering.
The main focus is to highlight the benefits of an approach covering the whole project life cycle of developing a Mars Rover.
The purpose is to provide students with a real-world multidisciplinary engineering experience, integrating practical engineering skills with soft skills such as business strategy and project management.
The competition is split into two stages: Qualifiers (Online) and Finals (On-site).
Points are awarded across various missions/sub-missions, with a total of 1000 points available both in the Qualifiers and the Finals.
The top 25 teams from the Qualifiers are invited to participate in the on-site Finals.
❑ Expedition
❑ Operation
❑ Assesment
The Finals consist of missions categorized as Expeditions, Operations, and Assessments. Expeditions like the Astrobiology Expedition (ABEx) involve mobile scientific laboratory tasks, Reconnaissance & Delivery Operation (RDO) focuses on item retrieval and delivery, while Autonomous Expedition (AutEx) tests the rover's autonomous navigation capabilities.
Instrument Deployment & Maintenance Operation (IDMO) involves precise maintenance tasks, and the assessment missions include Project Implementation & Management Assessment (PIMA) and Business Plan Presentation (BPP), focusing on project management and business strategy aspects.
Grand Awards: For the top three teams in the IRC.
World Rover League (WRL) Awards: Based on combined scores from multiple events.
Team of the Year: Recognizes significant improvement.
Excellence and Innovation: For creative ideas and exceptional performance in various challenges.
We Team Automatons, a robotics research and development team of Pimpri Chinchwad College of Engineering, are proud to participate in the International Rover Challenge (IRC) 2025, an event that challenges us to push the boundaries of Space exploration through robotics.
We represent a multidisciplinary group of undergraduate students passionate about developing cutting-edge technology to address real-world challenges in Space Robotics. IRC presents us with an exciting opportunity to apply our technical knowledge to build a rover capable of performing in simulated Mars-like environments.
Here we present our Rover Kartikeya, designed for challenging terrain and scientific exploration, integrates a 6-wheel rocker bogie mechanism with a robotic manipulator arm and specialized onboard compartments for scientific equipment.

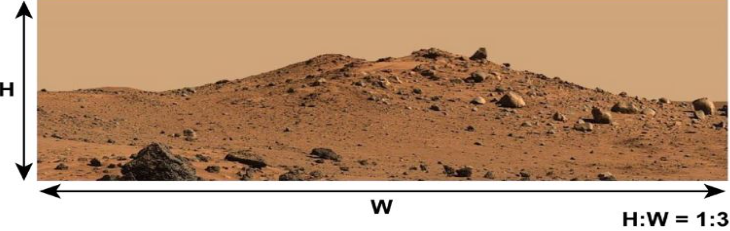
The mission involves using the rover as a mobile science lab to collect and analyze samples from at least two sites, aiming to identify potential for microbial life and detect signs of extinct or extant life. Equipped with cameras and on-board instruments, the rover will document sites with panoramic imaging, perform life-detection tests, and return one uncontaminated sample to the base station. All analysis must occur on-site, and findings, including data and images, will be submitted in a report. Teams must also present their science plan online days before the IRC finals.
Our rover employs the Intel RealSense D435i for depth measurements, panoramic imaging, and close-up shots, with video streamed via Raspberry Pi and 360° views from additional cameras. We collect sub-surface samples (10 cm deep) using an auger, storing them in dual compartments for preservation and analysis. For soil analysis, we prepare soil-water extracts to test pH and chemicals, capturing reactions with a microscopic camera. Our sensors analyze nutrients, moisture, temperature, humidity, and pressure, providing comprehensive environmental insights.
In this mission, rovers will perform reconnaissance and delivery operations within 500m of the base station. During reconnaissance, the rover will have 10 minutes to search for and locate objects. In the delivery stage, the rover has 20 minutes to pick up objects and deliver them to specified GPS coordinates or store them until the mission's end for later delivery to the base station.
Our rover’s 6-wheel rocker-bogie suspension ensures stability on rough terrains like sand and rocks. The Intel RealSense D435i depth camera, along with GPS module, enables precise object detection, navigation, and localization. The 5-DOF arm manipulator can handle objects up to 5 kg, lifting and storing them during reconnaissance and delivering them to GPS-marked locations. LoRa control facilitates remote operation. During delivery, the D435i camera and onboard processing ensure accurate object placement based on GPS coordinates and color markers, ensuring compliance with competition requirements.
Rovers must autonomously traverse between markers on rugged terrain, following black arrow signs that guide them to an endpoint marked by an orange traffic cone. The rover must stop inside each 2m radius circle of the arrow for at least 10 seconds before moving to the next. The team must announce the start of autonomous mode and may only monitor video and telemetry, not transmit commands. Hitting the arrow signs results in no points for that detection.
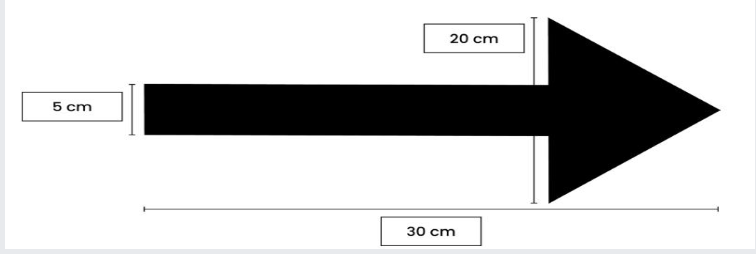
The rover uses OpenCV and custom algorithms for real-time arrow detection. Live video from the D435i depth camera is processed with grayscale, Gaussian blur, and Canny edge detection to identify arrows by their shape and aspect ratio. The rover tracks the arrow's centroid and adjusts its path to keep the arrow centered. GPS coordinates and directional data are logged, creating a course map. The travel path is visualized using OpenCV, with a convex hull applied to outline the route.
The mission involves two stages: Instrument Maintenance and Deployment. In the Maintenance stage, the rover picks up a cache (weighing less than 5 kg with a handle of 10 cm) and traverses to the instrument panel for maintenance. In the Deployment stage, the rover retrieves sample cache components and deploys them at designated locations near the collection panel.
Our rover's 5-DOF arm, powered by a Teensy microcontroller and BTS motor driver, features a Nema17 stepper motor-controlled parallel jaw gripper that can handle objects up to 5 kg with precision. The arm includes a turret and three motors with planetary gearboxes and encoders for accurate joint angles and stable movement. The gripper, using mechanical linkages and extruded fingertip attachments, can perform tasks like button pressing and knob turning without pneumatics. Stereo cameras align the gripper, and the Intel RealSense D435i provides depth data for object detection and placement. The EAST detector and Tesseract OCR read cache codes, and absolute encoders on each joint ensure accurate motion control. Inverse kinematics are used to calculate joint angles for precise positioning of the end effector in 3D space, which is manually controlled via a PS4 joystick for high precision and dexterity.
PIMA evaluates the rover's design and development, with teams presenting lessons learned from planning to testing. The presentation covers system engineering, management, and any spin-offs, followed by Q&A from judges. The Business and Partnership Plan (BPP) assesses the team's ability to develop business skills and build industry and academic partnerships to support the project.